『演習詳解 力学 第2版』のブックカードはこちらです。ほかの章に飛ぶときはこちらからどうぞブックカードへ
2-1 螺旋上の質点の運動 [ ] 3次元での運動です。軌跡は初めから与えられているので、運動のz成分が分かればすべて分かります。
正直言うと、エネルギー保存を使ってそこからzの微分方程式を導くこの解法はまったく思い浮かびませんでした。
言われてみると確かに、って感じです。グラフの形から抗力を計算して運動方程式を立てて・・・ってやるとたぶん死にます。解けるのかすら怪しいです。
エネルギー保存の式を整理すると簡単な一階微分方程式になります。初期値は勝手に決めていいのでt=0のときz=0としていいでしょう。
運動がわかってから抗力を求めるとうまくいくんですね。x,y,zを二階微分すれば加速度が出るので、そこから運動方程式を立てると抗力が出てきます。この系に登場する力は重力と抗力だけですからね。
螺旋の接線ベクトルですが,(dx/dt,dy/dt,dz/dt)で出てきますがx,yの中にzが陽に含まれているので(dx/dz,dy/dz,1)としても求まります。こっちのほうが楽ですね。
最後に、螺旋の接線ベクトルと抗力の内積を計算して0になることを確かめます。
めちゃくちゃ大変ですね・・・
おまけとして、この螺旋の概形です。
a=2.0, h=1.0
2-2 非自励系の二階線形常微分方程式、Green関数 [ ] 比較的解きやすい問題だと思います。(a)では非自励系の二階線形常微分方程式を定数変化法によって求めます。この方法は結構有名な手法で、問題では言われたとおりに計算していけば求めるものが出てきます。
ちなみに条件式(ⅲ)ですが、これは問題を解きやすくするために恣意的に置いたものになります。問題文にあるとおり、方程式一つに対して未知関数を2つおいているので、拘束条件のようなものを設定することができます。これは任意に設定することができますが、「このように設定すればあとの計算がすっきりする」ということで天下り的に導入されています。
実際計算を進めていくと、項同士消されたりして綺麗な形になります。
なお、初めの(ⅰ)の方程式が速度に比例する減衰項が含まれるものである場合も同じように(ⅲ)の拘束条件を設定することで解くことができます。ただこの場合はもう少し複雑になり、ロンスキアンと呼ばれる量が登場したりしてきますが。
(b)ではGreen関数が出てきます。Green関数は電磁気のラプラス方程式やポアソン方程式で出てくるほうが馴染みがあると思います。そこでよく出てくる形とは違う形をしていますが、(ⅷ)も立派な(?)Green関数です。
(ⅹ)を満たすことを示すには、デルタ関数の定義に則って両辺を積分します。解答では t ≠ t' の時に左辺が0になることを計算していますが、初めから無限区間で積分して左辺が1になることを示せば十分なのではないかと思っています。
最後に、f(t')をかけてt'で積分すると右辺はデルタ関数の定義よりf(t)、左辺は(ⅸ)の式と見比べると無事mx''+mωxが出てきて(ⅰ)が成立することを確認できます。めでたしめでたし。
2-3 「調和振動子+支点の指数関数的移動」による運動 [ ] t=-∞で単振動しているバネの支点をゆっくり動かすとどういう運動をするかという問題です。実は問題文に納得がいってなくて、初期条件で支点がx=lにあるなら、そのときの質点の運動はx=Acosωt+lになるはずじゃないかと思うのです。。。それかl=0として問題を進めていくか。
ただ僕の勘違いかもしれないので、そこのところわかる方いたら教えてほしいです。
(a)振動の模様を答える問題。まず質点に働く力はバネ定数と質点と支点の変位であることに注意して運動方程式を立てます。
するとこの運動方程式は調和振動子の強制振動の式とみなせるため、2-2の結果が使えてxの運動が解析的に求まります。解答ではこの積分はsinを複素数表示して解いていますがもちろん部分積分2回でも解けます。ここは好みの問題でしょうか。
振動の中心は支点よりも小さくなります。運動の様子をイメージするのが難しいです、、、
(b)α, tともに十分小さく、指数関数部分をaとみなせるような範囲を考えると、xの運動がaを中心とする単振動になるといえます。ただ指数関数部の影響が出てくる t >> 1までは質点の運動は単振動が支配的なので、当たり前の結果といえなくもなさそうです。
ちなみに、αもωも定数なんだからα→0を仮定しないで普通に指数関数のところが1になる、というような議論のほうが自然な気がするのですがどうでしょうか。
(c) 仕事を求めます。質点に働く力が時間の関数として陽に書けるので、時間に変数変換して積分します。またこの系についてエネルギー保存が成り立っていることも確かめられます。
ここで求めた仕事が正か負(つまりt=-∞とt=0でエネルギーは増えるか減るか)は a/2 と A の大小関係に依存します。Aの方が大きい場合、支点を動かすのは系に対してブレーキをかけるような感覚になるわけですね。
2-4抵抗を受ける場合のバネの振動と強制振動 [ ] 力学の典型問題を複素関数を駆使して解きます。
(a)強制力がない場合 [ ] まず運動方程式を書き下します。式(1)のカッコの中のxは必要ありません。誤植と考えられます。このカッコ全体は演算子です。これをLと便宜上おいておきます。
(1)の微分方程式の代わりに、複素数z(t)に演算子Lを作用させて得られる微分方程式を解くことにします。得られたz(t)に関する微分方程式ですが、演算子Lに虚数iが含まれないので L Re z(t)=0、L Im z(t)=0がそれぞれ独立に成立します。しかもRe z(t)、Im z(t)は実数関数です。よってRe z(t)、Im z(t)およびそれらの線形結合は式(1)の解になります。
z(t)にLを作用させて得られた二次方程式(特性方程式というやつです)を解くと、解は三種類あることが分かります。それぞれ減衰振動、臨界減衰、過減衰に分類されます。
減衰振動、過減衰は容易に理解できるでしょう。
問題は臨界振動です。二次方程式の解が重解になる場合に相当し、微分方程式の解が一つしか得られません。そこでもう一つの解を得るために二つの方法が提示されています。
最初の方法はω=β+δ(δは小さい)とおくというものですが、正直なところその意図が理解できませんでした。この手の問題の定石として先に得られた二つの解を極限的に一致させ、その過程で2つ目の解を見つけるという方法があります。示されているのはこの方法のことだと思うのですが、その場合ωはω_0でないといけません。誤植を疑って旧版を参照しましたが、この問題は載っていませんでした。
自分の勘違いかもしれませんので分かる方は修正をお願いします。
第二の方法はいわゆる定数変化法を使うものです。これは特に問題はないでしょう。
(b)強制力がある場合 [ ] 運動方程式の特解を求めましょう。(a)でもやったように微分方程式のx(t)を複素関数z(t)に置き換えてz(t)を求め、後でその実数部分をとるという方針でいきます。
まずz(t)の形として指数関数の肩に強制振動の角振動数を含むものを仮定します。外から無理やりこの角振動数で振動させるのですから、質点もこの角振動数で振動するでしょう。もしうまくいかなかったらそれまでのことです。解の形をまた予想して代入するのみです。
書いてある通りに計算すると特解が得られます。一般解は(a)の解にこの特解を足し合わせたものになります。
βが0でない限り斉次方程式の一般解はt→∞で0に収束しますから、最終的には一般解に相当する運動は消え、強制力による運動のみが残ります。
普通は抵抗によって質点の振動が外場の振動に追いつかず、位相にズレが生じると考えられます。そのズレはφで表されます。図2.10で示されているように、位相のズレは抵抗の大きさを表すβに依存し、また外場の角振動数が固有角振動数より大きい場合も位相差が大きくなることが読み取れます。
もう少し明快な説明もあるようなので誰か加筆をお願いします。
2-5 2階微分方程式のGreen関数とWronskian [ ] (`@coJJyMAN)
ポアソン方程式などでGreen関数を求めるのにはフーリエ変換を使ったりしたが,ロンスキーアンというものは名前と定義しか知らず,使ったことがなかった.テキストでは解法の手順が天下り式に与えられており,たしかに解法の練習にはなるが,「何故こんな定義の式を使うのか」気になる人(僕のこと)には,「何でこんなことやらされているのか意味がわからい」ので,正直気持ちが悪い.そこで,あくまで順番はテキストに則って進めるが,テキストの模範解答とは異なる道筋を辿り,自分にとって(計算ではなく)内容が理解できるものとした.模範解答が直線的すぎて意味が取りづらい方にとっても,少しでも参考になればいいかな?
2-5(a) [ ]
β
,
γ
{\displaystyle \beta,\gamma}
f
(
t
)
{\displaystyle f(t) }
L
x
(
t
)
=
f
(
t
)
,
L
=
D
2
+
2
β
D
+
γ
,
D
=
d
d
t
.
.
.
(
1
)
{\displaystyle
\begin{align}
L x(t) =f(t) ,\quad L=D^2+2\beta D+\gamma,\quad D=\frac{d}{dt}
\quad ...(1)
\end{align}
}
の特殊解を問題2-2の(ix)の形に書くGreen関数を求めたい.
ここで「問題2-2の(ix)の形」とは
x
o
(
t
)
=
1
m
∫
t
0
∞
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
.
.
.
(
i
x
)
{\displaystyle
\begin{align}
x_o (t)=\frac 1 m \int_{t_0}^{\infty}G(t,t')f(t')dt'
\quad ...(ix)
\end{align}
}
で,
G
(
t
,
t
′
)
=
{
H
(
t
,
t
′
)
t
≥
t
′
0
t
<
t
′
{\displaystyle
G(t,t')=\begin{cases} H(t,t') & t \ge t' \\ 0 & t < t' \end{cases}
}
となるものである.
問題2-2では
G
{\displaystyle G}
(
D
2
+
ω
2
)
G
(
t
,
t
′
)
=
δ
(
t
−
t
′
)
{\displaystyle
(D^2+\omega^2)G(t,t')=\delta(t-t')
}
であった.それでもし
(
D
2
+
ω
2
)
y
(
t
)
=
f
(
t
)
{\displaystyle
(D^2+\omega^2)y(t)=f(t)
}
という方程式があったら,この
y
{\displaystyle y}
y
(
t
)
=
∫
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
{\displaystyle
y(t)=\int G(t,t')f(t')dt'
}
という積分で求められる.
(
D
2
+
ω
2
)
y
=
0
{\displaystyle (D^2+\omega^2)y=0}
さて,
L
x
=
f
{\displaystyle L x=f}
(
D
2
+
2
β
D
+
γ
)
x
=
f
.
.
.
(
2
)
{\displaystyle
(D^2+2\beta D +\gamma)x=f
\quad ...(2)
}
D
g
(
t
)
=
b
g
(
t
)
{\displaystyle
Dg(t)=bg(t)
}
となる
g
{\displaystyle g}
β
{\displaystyle \beta}
x
=
g
y
,
f
=
g
f
~
.
.
.
(
3
)
{\displaystyle
x=gy,\quad f=g\tilde{f}
\quad ...(3)
}
とする.
D
x
=
(
D
g
)
y
+
g
(
D
y
)
=
g
(
b
y
+
D
y
)
,
D
2
x
=
(
D
2
g
)
y
+
2
(
D
g
)
(
D
y
)
+
g
(
D
2
y
)
=
g
(
b
2
y
+
2
b
D
y
+
D
2
y
)
{\displaystyle
\begin{align}
Dx&=(Dg)y+g(Dy)=g(by+Dy), \\
D^2x&=(D^2g)y+2(Dg)(Dy)+g(D^2y) \\
&=g(b^2y+2bDy+D^2y)
\end{align}
}
なので,(2) 式は
g
[
(
b
2
y
+
2
b
D
y
+
D
2
y
)
+
2
β
(
b
y
+
D
y
)
+
γ
]
y
=
g
f
~
{\displaystyle
g[(b^2y+2bDy+D^2y)+2\beta(by+Dy)+\gamma]y=g\tilde{f}
}
つまり
[
(
b
2
y
+
2
b
D
y
+
D
2
y
)
+
2
β
(
b
y
+
D
y
)
+
γ
]
y
=
f
~
.
.
.
(
4
)
{\displaystyle
[(b^2y+2bDy+D^2y)+2\beta(by+Dy)+\gamma] y = \tilde{f}
\quad ...(4)
}
となる.この式の
D
y
{\displaystyle Dy}
b
=
−
β
{\displaystyle b=-\beta}
D
g
(
t
)
=
−
β
g
(
t
)
{\displaystyle Dg(t)=-\beta g(t)}
g
(
t
)
=
e
−
β
t
.
.
.
(
5
)
{\displaystyle
g(t)=e^{-\beta t}
\quad ...(5)
}
であり,これより(3) 式は
y
(
t
)
=
e
β
t
x
(
t
)
,
f
~
(
t
)
=
e
β
t
f
(
t
)
.
.
.
(
6
)
{\displaystyle
y(t)=e^{\beta t} x(t) ,\quad \tilde{f}(t)=e^{\beta t}f(t)
\quad ...(6)
}
という関係で具体的にあらわされることがわかり,また,(4) 式は
(
D
2
+
γ
−
β
2
)
y
(
t
)
=
f
~
(
t
)
.
.
.
(
7
)
{\displaystyle
(D^2+\gamma -\beta^2)y(t)=\tilde{f}(t)
\quad ...(7)
}
という方程式となる.これで問題2-2の形になった.
2-5(b) [ ] 次に(7)式を解いていくことを考えるのだが,先に定数を書き直して
(
D
2
−
λ
2
)
y
(
t
)
=
f
~
(
t
)
,
λ
=
β
2
−
γ
.
.
.
(
8
)
{\displaystyle
\begin{align}
(D^2-\lambda^2)y(t)=\tilde{f}(t),\quad \lambda=\sqrt{\beta^2-\gamma}
\quad ...(8)
\end{align}
}
としておく.さて,手がかりをつかむためにまずは右辺をゼロとした方程式(斉次方程式)
(
D
2
−
λ
2
)
y
(
t
)
=
0
.
.
.
(
9
)
{\displaystyle
\begin{align}
(D^2-\lambda^2)y(t)=0
\quad ...(9)
\end{align}
}
を解く.(ちなみにこれは
f
(
t
)
=
0
{\displaystyle f(t) = 0}
f
(
t
)
=
0
{\displaystyle f(t) = 0}
f
~
(
t
)
=
e
β
t
f
(
t
)
=
0
{\displaystyle \tilde{f}(t)=e^{\beta t}f(t)=0}
2次方程式なので,線形独立な解は2つある.それを
y
1
(
t
)
,
y
2
(
2
)
{\displaystyle y_1 (t),y_2 (2)}
さて,線形独立であるということは,
C
1
y
1
(
t
)
+
C
2
y
2
(
t
)
=
0
.
.
.
(
10
)
{\displaystyle
\begin{align}
C_1 y_1(t)+C_2 y_2(t)=0
\quad ...(10)
\end{align}
}
という方程式が常に成り立つには
C
1
=
C
2
=
0
{\displaystyle C_1 = C_2 = 0}
C
1
D
y
1
(
t
)
+
C
2
D
y
2
(
t
)
=
0
.
.
.
(
11
)
{\displaystyle
\begin{align}
C_1 Dy_1(t)+C_2 Dy_2(t)=0
\quad ...(11)
\end{align}
}
も同時に成り立っている.この2つの式をまとめると
(
y
1
y
2
D
y
1
D
y
2
)
(
C
1
C
2
)
=
(
0
0
)
.
.
.
(
12
)
{\displaystyle
\begin{align}
\begin{pmatrix} y_{ 1 } & y_{ 2 } \\ Dy_{ 1 } & Dy_{ 2 } \end{pmatrix}\begin{pmatrix} C_1 \\ C_2 \end{pmatrix}=\begin{pmatrix} 0 \\ 0 \end{pmatrix}
\quad ...(12)
\end{align}
}
つまり
(
C
1
C
2
)
=
(
y
1
y
2
D
y
1
D
y
2
)
−
1
(
0
0
)
.
.
.
(
13
)
{\displaystyle
\begin{align}
\begin{pmatrix} C_1 \\ C_2 \end{pmatrix}=\begin{pmatrix} y_{ 1 } & y_{ 2 } \\ Dy_{ 1 } & Dy_{ 2 } \end{pmatrix}^{-1}\begin{pmatrix} 0 \\ 0 \end{pmatrix}
\quad ...(13)
\end{align}
}
であるが,この式が成り立つためには式の中にある行列の行列式が,ゼロになることが無いようになっていなければならない.この行列式
W
(
y
1
,
y
2
)
=
|
y
1
(
t
)
y
2
(
t
)
D
y
1
(
t
)
D
y
2
(
t
)
|
.
.
.
(
14
)
{\displaystyle
\begin{align}
W(y_1,y_2)=\begin{vmatrix} y_1(t) & y_2(t) \\ Dy_1(t)& Dy_2(t) \end{vmatrix}
\quad ...(14)
\end{align}
}
この行列式を時間変化を見るのに微分してみると,先の(9)式を思い出せば
D
2
y
=
λ
2
y
{\displaystyle D^2y=\lambda^2 y}
D
W
=
D
(
y
1
D
y
2
−
y
2
D
y
1
)
=
(
D
y
1
)
(
D
y
2
)
+
y
1
D
2
y
2
−
(
D
y
2
)
(
D
y
1
)
−
y
2
D
2
y
1
=
y
1
λ
2
y
2
−
y
2
λ
2
y
1
=
0
{\displaystyle
\begin{align}
DW&=D(y_1Dy_2-y_2Dy_1)\\
&=(Dy_1)(Dy_2)+y_1D^2y_2-(Dy_2)(Dy_1)-y_2D^2y_1\\
&=y_1\lambda^2y_2-y_2\lambda^2y_1=0
\end{align}
}
ということは,
W
(
y
1
,
y
2
)
{\displaystyle W(y_1,y_2)}
2-5(c) [ ] それではいよいよ,
L
0
y
=
f
~
,
L
0
=
(
D
2
−
λ
2
)
{\displaystyle
L_0 y=\tilde{f},\quad L_0=(D^2-\lambda^2)
}
の方程式の解をGreen関数の形で求めていこう.手がかりは前回求めた
W
(
y
1
,
y
2
)
{\displaystyle W(y_1,y_2)}
L
0
y
0
(
t
)
=
f
~
{\displaystyle
L_0 y_0(t)=\tilde{f}
}
すると,一般解についても,もちろん
L
0
y
(
t
)
=
f
~
{\displaystyle
L_0 y(t)=\tilde{f}
}
なのだから,この二つを引き算して
L
0
[
y
(
t
)
−
y
0
(
t
)
]
=
0
.
.
.
(
15
)
{\displaystyle \begin{align}
L_0[y(t)-y_0(t)]=0
...(15)\end{align}}
この式はつまり,
y
(
t
)
−
y
0
(
t
)
{\displaystyle y(t)-y_0(t)}
L
0
y
=
0
{\displaystyle L_0 y=0}
y
1
{\displaystyle y_1}
y
2
{\displaystyle y_2}
y
(
t
)
−
y
0
(
t
)
=
c
1
y
1
(
t
)
+
c
2
y
2
(
t
)
{\displaystyle
y(t)-y_0(t)=c_1 y_1(t)+c_2 y_2(t)
}
すなわち,一般解はかならず
y
(
t
)
=
y
0
(
t
)
+
c
1
y
1
(
t
)
+
c
2
y
2
(
t
)
.
.
.
(
16
)
{\displaystyle \begin{align}
y(t)=y_0(t)+c_1 y_1(t)+c_2 y_2(t)
...(16)\end{align}}
というかたちになっていることが分かる.
さて,特殊解
y
0
{\displaystyle y_0}
y
1
{\displaystyle y_1}
y
2
{\displaystyle y_2}
y
0
(
t
)
=
A
y
1
(
t
)
+
B
y
2
(
t
)
{\displaystyle
y_0(t)=Ay_1(t)+By_2(t)
}
であらわすことができそうな気がする.しかしもちろん
A
{\displaystyle A}
B
{\displaystyle B}
y
0
(
t
)
=
A
(
t
)
y
1
(
t
)
+
B
(
t
)
y
2
(
t
)
.
.
.
(
17
)
{\displaystyle \begin{align}
y_0(t)=A(t) y_1(t)+B(t) y_2(t)
...(17)\end{align}}
ただし
A
(
t
)
{\displaystyle A(t)}
B
(
t
)
{\displaystyle B(t)}
y
0
=
A
y
1
+
B
y
2
{\displaystyle y_0=Ay_1+By_2}
D
y
0
=
(
D
A
)
y
1
+
A
D
y
1
+
(
D
B
)
y
2
+
B
D
y
2
{\displaystyle
Dy_0=(DA)y_1+ADy_1+(DB)y_2+BDy_2
}
ここで,
A
{\displaystyle A}
B
{\displaystyle B}
(
D
A
)
y
1
+
(
D
B
)
y
2
=
0
.
.
.
(
18
)
{\displaystyle \begin{align}
(DA)y_1+(DB)y_2=0
...(18)\end{align}}
という式が成り立つものとすると
D
y
0
=
A
D
y
1
+
B
D
y
2
{\displaystyle
Dy_0=ADy_1+BDy_2
}
もう一回微分して
D
2
y
0
=
(
D
A
)
(
D
y
1
)
+
A
(
D
2
y
1
)
+
(
D
B
)
(
D
y
2
)
+
B
(
D
2
y
2
)
.
.
.
(
19
)
{\displaystyle \begin{align}
D^2y_0=(DA)(Dy_1)+A(D^2y_1)+(DB)(Dy_2)+B(D^2y_2)
...(19)\end{align}}
L
0
y
0
=
f
~
{\displaystyle L_0 y_0=\tilde{f}}
D
2
y
0
=
λ
2
y
0
+
f
~
=
λ
2
A
y
1
+
λ
2
B
y
2
+
f
~
.
.
.
(
20
)
{\displaystyle \begin{align}
D^2y_0=\lambda^2 y_0+\tilde{f}=\lambda^2 Ay_1+\lambda^2 By_2+\tilde{f}
...(20)\end{align}}
ということは
(
D
A
)
(
D
y
1
)
+
A
(
D
2
−
λ
2
)
y
1
+
(
D
B
)
(
D
y
2
)
+
B
(
D
2
−
λ
2
)
y
2
=
f
~
{\displaystyle
(DA)(Dy_1)+A(D^2-\lambda^2)y_1+(DB)(Dy_2)+B(D^2-\lambda^2)y_2=\tilde{f}
}
L
0
y
1
=
0
,
L
0
y
2
=
0
{\displaystyle L_0 y_1=0,L_0y_2=0}
(
D
A
)
(
D
y
1
)
+
(
D
B
)
(
D
y
2
)
=
f
~
.
.
.
(
21
)
{\displaystyle \begin{align}
(DA)(Dy_1)+(DB)(Dy_2)=\tilde{f}
...(21)\end{align}}
今までに出てきた条件は,(18)と(21)の二つの式にまとめられる
(
D
A
)
y
1
+
(
D
B
)
y
2
=
0
(
D
A
)
(
D
y
1
)
+
(
D
B
)
(
D
y
2
)
=
f
~
{\displaystyle \begin{align}
(DA)y_1+(DB)y_2=0\\
(DA)(Dy_1)+(DB)(Dy_2)=\tilde{f}
\end{align}}
これを行列を使って書くと
(
y
1
y
2
D
y
1
D
y
2
)
(
D
A
D
B
)
=
(
0
f
~
)
.
.
.
(
22
)
{\displaystyle \begin{align}
\begin{pmatrix} y_{ 1 } & y_{ 2 } \\ Dy_{ 1 } & Dy_{ 2 } \end{pmatrix}\begin{pmatrix} DA \\ DB \end{pmatrix}=\begin{pmatrix} 0 \\ \tilde { f } \end{pmatrix}
...(22)\end{align}}
したがって
(
D
A
D
B
)
=
(
y
1
y
2
D
y
1
D
y
2
)
−
1
(
0
f
~
)
{\displaystyle \begin{align}
\begin{pmatrix} DA \\ DB \end{pmatrix}=\begin{pmatrix} y_{ 1 } & y_{ 2 } \\ Dy_{ 1 } & Dy_{ 2 } \end{pmatrix}^{-1}\begin{pmatrix} 0 \\ \tilde { f } \end{pmatrix}
\end{align}}
これは
W
(
y
1
,
y
2
)
{\displaystyle W(y_1,y_2)}
(
D
A
D
B
)
=
1
W
(
y
1
,
y
2
)
(
D
y
2
−
y
2
−
D
y
1
y
1
)
(
0
f
~
)
.
.
.
(
23
)
{\displaystyle \begin{align}
\begin{pmatrix} DA \\ DB \end{pmatrix}=\frac{1}{W(y_1,y_2)}\begin{pmatrix} Dy_{ 2 } & -y_{ 2 } \\ -Dy_{ 1 } & y_{ 1 } \end{pmatrix}\begin{pmatrix} 0 \\ \tilde { f } \end{pmatrix}
...(23)\end{align}}
と書けて,
D
A
=
−
y
2
f
~
W
(
y
1
,
y
2
)
,
D
B
=
y
1
f
~
W
(
y
1
,
y
2
)
{\displaystyle
DA=\frac{-y_2 \tilde{f}}{W(y_1,y_2)},
\quad DB=\frac{y_1 \tilde{f}}{W(y_1,y_2)}
}
という微分方程式となる.これより
A
{\displaystyle A}
B
{\displaystyle B}
A
=
∫
t
0
t
−
y
2
(
t
′
)
f
~
(
t
′
)
W
(
t
′
;
y
1
,
y
2
)
d
t
′
,
B
=
∫
t
0
t
y
1
(
t
′
)
f
~
(
t
′
)
W
(
t
′
;
y
1
,
y
2
)
d
t
′
.
.
.
(
24
)
{\displaystyle \begin{align}
A=\int_{t_0}^t \frac{-y_2(t') \tilde{f}(t')}{W(t';y_1,y_2)}dt',
\quad B=\int_{t_0}^t \frac{y_1(t') \tilde{f}(t')}{W(t';y_1,y_2)}dt'
...(24)\end{align}}
のように表わすことができるので,特殊解の定義式(17)より
y
0
(
t
)
=
A
(
t
)
y
1
(
t
)
+
B
(
t
)
y
2
(
t
)
=
∫
t
0
t
y
2
(
t
)
y
1
(
t
′
)
−
y
1
(
t
)
y
2
(
t
′
)
W
(
t
′
;
y
1
,
y
2
)
f
~
(
t
′
)
d
t
′
{\displaystyle \begin{align}
y_0(t)&=A(t) y_1(t)+B(t) y_2(t)\\
&=\int_{t_0}^t \frac{y_2(t)y_1(t')-y_1(t)y_2(t') }{W(t';y_1,y_2)}\tilde{f}(t')dt'
\end{align}}
G
(
t
,
t
′
)
=
{
y
2
(
t
)
y
1
(
t
′
)
−
y
1
(
t
)
y
2
(
t
′
)
W
(
t
′
;
y
1
,
y
2
)
t
≥
t
′
0
t
<
t
′
.
.
.
(
25
)
{\displaystyle \begin{align}
G(t,t')=\begin{cases} \frac{y_2(t)y_1(t')-y_1(t)y_2(t') }{W(t';y_1,y_2)} & t \ge t' \\ 0 & t<t' \end{cases}
...(25)\end{align}}
とおけば,上の式は
y
0
(
t
)
=
∫
t
0
∞
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
.
.
.
(
26
)
{\displaystyle \begin{align}
y_0(t)=\int_{t_0}^\infty G(t,t')\tilde{f}(t')dt'
...(26)\end{align}}
となる.したがって
y
{\displaystyle y}
y
(
t
)
=
∫
t
0
∞
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
+
c
1
y
1
(
t
)
+
c
2
y
2
(
t
)
.
.
.
(
27
)
{\displaystyle \begin{align}
y(t)=\int_{t_0}^\infty G(t,t')\tilde{f}(t')dt'+c_1 y_1(t)+c_2 y_2(t)
...(27)\end{align}}
となる.当初の目的の方程式の解
x
(
t
)
{\displaystyle x(t)}
y
(
t
)
=
e
β
t
x
(
t
)
,
f
~
(
t
)
=
e
β
t
f
(
t
)
.
.
.
(
6
)
{\displaystyle \begin{align}
y(t)=e^{\beta t} x(t) ,\quad \tilde{f}(t)=e^{\beta t}f(t)
...(6)\end{align}}
より
x
(
t
)
=
∫
t
0
∞
e
−
β
t
G
(
t
,
t
′
)
e
β
t
′
f
(
t
′
)
d
t
′
+
c
1
e
−
β
t
y
1
(
t
)
+
c
2
e
−
β
t
y
2
(
t
)
{\displaystyle
x(t)=\int_{ t_{ 0 } }^{ \infty }{e^{-\beta t}G(t,t') e^{\beta t'} f(t') d t'} +c_{ 1 }e^{ -\beta t }y_{ 1 }(t)+c_{ 2 }e^{ -\beta t }y_{ 2 }(t)
}
この後ろの2項は,
L
x
(
t
)
=
0
{\displaystyle Lx(t)=0}
x
(
t
)
=
∫
t
0
∞
e
−
β
t
G
(
t
,
t
′
)
e
β
t
′
f
(
t
)
d
t
′
+
c
1
x
1
(
t
)
+
c
2
x
2
(
t
)
.
.
.
(
28
)
{\displaystyle \begin{align}
x(t)=\int_{t_0}^\infty e^{-\beta t}G(t,t')e^{\beta t'}f(t)dt'+c_1 x_1(t)+c_2 x_2(t)
...(28)\end{align}}
これが,
x
(
t
)
{\displaystyle x(t)}
λ
≠
0
{\displaystyle \lambda\neq0}
L
0
y
=
0
{\displaystyle L_0 y=0}
y
1
(
t
)
=
e
−
λ
t
,
y
2
(
t
)
=
e
λ
t
.
.
.
(
29
)
{\displaystyle \begin{align}
y_1(t)=e^{-\lambda t},\quad y_2(t)=e^{\lambda t}
...(29)\end{align}}
このとき
W
(
y
1
,
y
2
)
{\displaystyle W(y_1,y_2)}
W
(
y
1
,
y
2
)
=
e
−
λ
t
(
λ
)
e
λ
t
−
e
λ
t
(
−
λ
)
e
−
λ
t
=
2
λ
=
C
o
n
s
t
.
.
.
.
(
30
)
{\displaystyle \begin{align}
W(y_1,y_2)=e^{-\lambda t}(\lambda)e^{\lambda t}-e^{\lambda t}(-\lambda)e^{-\lambda t}=2\lambda=Const.
...(30)\end{align}}
となり,Green関数は
G
(
t
,
t
′
)
=
1
2
λ
{
e
λ
(
t
−
t
′
)
−
e
−
λ
(
t
−
t
′
)
t
≥
t
′
0
t
<
t
′
.
.
.
(
31
)
{\displaystyle \begin{align}
G(t,t')=\frac {1}{ 2\lambda }\begin{cases} e^{\lambda(t-t')}-e^{-\lambda(t-t')} & t \ge t' \\ 0 & t<t' \end{cases}
...(31)\end{align}}
となる.もし
λ
=
0
{\displaystyle \lambda=0}
y
1
(
t
)
=
1
,
y
2
(
t
)
=
t
.
.
.
(
32
)
{\displaystyle \begin{align}
y_1(t)=1,\quad y_2(t)=t
...(32)\end{align}}
y
{\displaystyle y}
y
0
(
t
)
=
∫
t
0
t
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
=
∫
t
0
∞
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
{\displaystyle
y_0(t)=\int_{t_0}^t G(t,t')\tilde{f}(t')dt'=\int_{t_0}^\infty G(t,t')\tilde{f}(t')dt'
}
に関係する
F
(
t
,
t
0
)
=
∫
t
0
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
.
.
.
(
33
)
{\displaystyle \begin{align}
F(t,t_0)=\int^{t_0} G(t,t')\tilde{f}(t')dt'
...(33)\end{align}}
という量を計算してみれば,
W
=
C
o
n
s
t
.
{\displaystyle W=Const.}
F
=
∫
t
0
y
2
(
t
)
y
1
(
t
′
)
−
y
1
(
t
)
y
2
(
t
′
)
W
f
~
(
t
′
)
d
t
′
=
−
1
W
(
∫
t
0
y
2
(
t
′
)
f
(
t
′
)
d
t
′
)
y
1
(
t
)
+
1
W
(
∫
t
0
y
1
(
t
′
)
f
(
t
′
)
d
t
′
)
y
2
(
t
)
{\displaystyle \begin{align}
F&=\int^{t_0} \frac{y_2(t)y_1(t')-y_1(t)y_2(t') }{W} \tilde{f}(t')dt'\\
&=-\frac 1 W\left(\int^{t_0} y_2(t')f(t')dt'\right)y_1(t)\\
&\quad +\frac 1 W\left(\int^{t_0} y_1(t')f(t')dt'\right)y_2(t)
\end{align}}
これは
F
=
C
1
′
y
1
(
t
)
+
C
2
′
y
2
(
t
)
.
.
.
(
34
)
{\displaystyle \begin{align}
F=C'_1 y_1(t)+C'_2 y_2(t)
...(34)\end{align}}
と書ける.この
C
′
{\displaystyle C'}
t
{\displaystyle t}
y
{\displaystyle y}
y
(
t
)
=
∫
t
0
t
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
+
c
1
y
1
(
t
)
+
c
2
y
2
(
t
)
=
∫
t
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
−
∫
t
0
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
+
c
1
y
1
(
t
)
+
c
2
y
2
(
t
)
=
∫
t
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
+
(
c
1
−
C
1
′
)
y
1
(
t
)
+
(
c
2
−
C
2
′
)
y
2
(
t
)
{\displaystyle \begin{align}
y(t)
&=\int_{t_0}^{t} G(t,t')\tilde{f}(t')dt'+c_1 y_1(t)+c_2 y_2(t)\\
&=\int^{t} G(t,t')\tilde{f}(t')dt'-\int^{t_0} G(t,t')\tilde{f}(t')dt'+c_1 y_1(t)+c_2 y_2(t)\\
&=\int^{t} G(t,t')\tilde{f}(t')dt'+(c_1 -C'_1) y_1(t)+(c_2 -C'_2) y_2(t)\\
\end{align}}
これは
y
(
t
)
=
∫
t
G
(
t
,
t
′
)
f
~
(
t
′
)
d
t
′
+
C
1
y
1
(
t
)
+
C
2
y
2
(
t
)
.
.
.
(
35
)
{\displaystyle \begin{align}
y(t)=\int^{t} G(t,t')\tilde{f}(t')dt'+C_1 y_1(t)+C_2 y_2(t)\\
...(35)\end{align}}
と書くことができる.したがって
x
(
t
)
{\displaystyle x(t)}
x
(
t
)
=
∫
t
e
−
β
t
G
(
t
,
t
′
)
e
β
t
′
f
(
t
′
)
d
t
′
+
C
1
x
1
(
t
)
+
C
2
x
2
(
t
)
.
.
.
(
36
)
{\displaystyle \begin{align}
x(t)=\int^{t} e^{-\beta t}G(t,t')e^{\beta t'}f(t')dt'+C_1 x_1(t)+C_2 x_2(t)
...(36)\end{align}}
と書くことができる.
2-5(d) [ ] 試しに
L
x
=
f
{\displaystyle L x=f}
x
{\displaystyle x}
L
x
=
f
,
L
=
D
2
+
2
β
D
+
γ
{\displaystyle
Lx=f, \quad L=D^2+2\beta D+\gamma
}
ここで,
L
x
k
=
0
{\displaystyle Lx_k=0}
x
1
,
x
2
{\displaystyle x_1, x_2}
W
(
x
1
,
x
2
)
=
|
x
1
x
2
D
x
1
D
x
2
|
.
.
.
(
37
)
{\displaystyle
W(x_{1},x_{2})=
\begin{vmatrix} x_{ 1 } & x_{ 2 } \\ Dx_{ 1 } & Dx_{ 2 } \end{vmatrix}
\quad ...(37)
}
は,その時間変化が
d
W
d
t
=
|
D
x
1
D
x
2
D
2
x
1
D
2
x
2
|
=
−
|
D
x
1
D
x
2
−
2
β
D
x
1
−
2
β
D
x
2
|
−
|
D
x
1
D
x
2
−
γ
x
1
−
γ
x
2
|
=
γ
|
x
1
x
2
D
x
1
D
x
2
|
=
γ
W
(
x
1
,
x
2
)
.
.
.
(
38
)
{\displaystyle
\begin{align}
\frac {dW}{d t}
&=\begin{vmatrix}D x_{ 1 } & Dx_{ 2 } \\ D^2x_{ 1 } & D^2x_{ 2 } \end{vmatrix}\\
&=-\begin{vmatrix}D x_{ 1 } & Dx_{ 2 } \\ -2\beta Dx_{ 1 } & -2\beta Dx_{ 2 } \end{vmatrix}
-\begin{vmatrix}D x_{ 1 } & Dx_{ 2 } \\ -\gamma x_{ 1 } & -\gamma x_{ 2 } \end{vmatrix}\\
&=\gamma \begin{vmatrix} x_{ 1 } & x_{ 2 } \\ Dx_{ 1 } & Dx_{ 2 } \end{vmatrix}=\gamma W(x_{1},x_{2})
\quad ...(38)
\end{align}
}
以前と同様に特殊解を
x
0
(
t
)
=
A
(
t
)
x
1
(
t
)
+
B
(
t
)
x
2
(
t
)
.
.
.
(
39
)
{\displaystyle
x_0(t)=A(t)x_1(t)+B(t)x_2(t)\quad ...(39)
}
として
(
D
A
)
x
1
+
(
D
B
)
x
2
=
0
.
.
.
(
40
)
{\displaystyle
(DA)x_1+(DB)x_2=0\quad ...(40)
}
とすると,
D
x
0
=
A
D
x
1
+
B
D
x
2
D
2
x
0
=
(
D
A
)
(
D
x
1
)
+
A
(
D
2
x
1
)
+
(
D
B
)
(
D
x
2
)
+
B
(
D
2
x
2
)
{\displaystyle
\begin{align}
Dx_0&=ADx_1+BDx_2\\
D^2 x_0&=(DA)(Dx_1)+A(D^2 x_1)+(DB)(Dx_2)+B(D^2 x_2)
\end{align}
}
であり,
D
2
x
0
=
−
2
β
D
x
0
+
γ
x
0
+
f
=
−
2
β
A
D
x
1
−
2
β
B
D
x
2
−
γ
A
x
1
−
γ
B
x
2
+
f
{\displaystyle
\begin{align}
D^2x_0
&= -2\beta Dx_0+\gamma x_0+f\\
&= -2\beta ADx_1-2\beta BDx_2-\gamma Ax_1-\gamma Bx_2+f
\end{align}
}
だから,
(
D
A
)
(
D
x
1
)
+
(
D
B
)
(
D
x
2
)
=
f
.
.
.
(
41
)
{\displaystyle
(DA)(Dx_1)+(DB)(Dx_2)=f\quad ...(41)
}
したがって,同様に
(
D
A
D
B
)
=
1
W
(
x
1
,
x
2
)
(
D
x
2
−
x
2
−
D
x
1
x
1
)
(
0
f
)
{\displaystyle
\begin{pmatrix} DA \\ DB \end{pmatrix}=\frac{1}{W(x_1,x_2)}\begin{pmatrix} Dx_{ 2 } & -x_{ 2 } \\ -Dx_{ 1 } & x_{ 1 } \end{pmatrix}\begin{pmatrix} 0 \\ f \end{pmatrix}
}
D
A
=
−
x
2
f
~
W
(
x
1
,
x
2
)
,
D
B
=
x
1
f
~
W
(
x
1
,
x
2
)
{\displaystyle
DA=\frac{-x_2 \tilde{f}}{W(x_1,x_2)},
\quad DB=\frac{x_1 \tilde{f}}{W(x_1,x_2)}
}
A
(
t
)
=
∫
t
0
t
−
x
2
(
t
′
)
f
(
t
′
)
W
(
t
′
;
y
1
,
y
2
)
d
t
′
,
B
(
t
)
=
∫
t
0
t
x
1
(
t
′
)
f
(
t
′
)
W
(
t
′
;
x
1
,
x
2
)
d
t
′
.
.
.
(
42
)
{\displaystyle
A(t)=\int_{t_0}^t \frac{-x_2(t') f(t')}{W(t';y_1,y_2)}dt',
\quad B(t)=\int_{t_0}^t \frac{x_1(t') f(t')}{W(t';x_1,x_2)}dt'
\quad ...(42)
}
となるので
x
0
(
t
)
=
∫
t
0
t
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
.
.
.
(
43
)
{\displaystyle
x_0 (t)=\int_{t_0}^{t}{\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}
\quad ...(43)
}
が得られる.
D
x
0
(
t
)
=
1
Δ
t
∫
t
0
t
+
Δ
t
x
1
(
t
′
)
x
2
(
t
+
Δ
t
)
−
x
1
(
t
+
Δ
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
−
1
Δ
t
∫
t
0
t
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
1
Δ
t
∫
t
0
t
+
Δ
t
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
−
1
Δ
t
∫
t
0
t
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
+
1
Δ
t
∫
t
0
t
x
1
(
t
′
)
[
D
x
2
(
t
)
Δ
t
]
−
[
D
x
1
(
t
)
Δ
t
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
1
Δ
t
∫
t
t
+
Δ
t
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
+
∫
t
0
t
x
1
(
t
′
)
[
D
x
2
(
t
)
]
−
[
D
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
x
1
(
t
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
)
W
(
x
1
(
t
)
,
x
2
(
t
)
)
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
D
x
2
(
t
)
]
−
[
D
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
∫
t
0
t
x
1
(
t
′
)
[
D
x
2
(
t
)
]
−
[
D
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
.
.
.
(
44
)
{\displaystyle
\begin{align}
Dx_0(t)
&=\frac{1}{\Delta t}\int_{t_0}^{t+\Delta t}{\frac{x_1(t')x_2(t+\Delta t)-x_1(t+\Delta t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')dt'}\\
&-\frac{1}{\Delta t}\int_{t_0}^{t}{\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=\frac{1}{\Delta t}\int_{t_0}^{t+\Delta t}{\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&-\frac{1}{\Delta t}\int_{t_0}^{t}{\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&+\frac{1}{\Delta t}\int_{t_0}^{t}{\frac{x_1(t')[Dx_2(t)\Delta t]-[Dx_1(t)\Delta t]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=\frac{1}{\Delta t}\int_{t}^{t+\Delta t}{\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&+\int_{t_0}^{t}{\frac{x_1(t')[Dx_2(t)]-[Dx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=\frac{x_1(t)x_2(t)-x_1(t)x_2(t)}{W(x_1(t),x_2(t))}f(t)\\
&+\int_{t_0}^{t}{\frac{x_1(t')[Dx_2(t)]-[Dx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=\int_{t_0}^{t}{\frac{x_1(t')[Dx_2(t)]-[Dx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}
\quad...(44)
\end{align}
}
同様の計算で,
D
2
x
0
(
t
)
=
x
1
(
t
)
[
D
x
2
(
t
)
]
−
[
D
x
1
(
t
)
]
x
2
(
t
)
W
(
x
1
(
t
)
,
x
2
(
t
)
)
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
D
2
x
2
(
t
)
]
−
[
D
2
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
D
2
x
2
(
t
)
]
−
[
D
2
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
.
.
.
(
45
)
{\displaystyle
\begin{align}
D^2x_0(t)
&=\frac{x_1(t)[Dx_2(t)]-[Dx_1(t)]x_2(t)}{W(x_1(t),x_2(t))}f(t)\\
&+\int_{t_0}^{t}{\frac{x_1(t')[D^2x_2(t)]-[D^2x_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=f(t)
+\int_{t_0}^{t}{\frac{x_1(t')[D^2x_2(t)]-[D^2x_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}
\quad...(45)
\end{align}
}
したがって
L
x
0
(
t
)
=
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
L
x
2
(
t
)
]
−
[
L
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
f
(
t
)
.
.
.
(
46
)
{\displaystyle
\begin{align}
Lx_0(t)
&=f(t)+\int_{t_0}^{t}{\frac{x_1(t')[Lx_2(t)]-[Lx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=f(t)
\quad...(46)
\end{align}
}
である.
一方,以前と同じように
G
(
t
,
t
′
)
=
{
x
1
(
t
′
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
t
≥
t
′
0
t
<
t
′
.
.
.
(
47
)
{\displaystyle
G(t,t')=
\begin{cases}
\frac{x_1(t')x_2(t)-x_1(t)x_2(t')}{W(x_1(t'),x_2(t'))} & t\ge t' \\
0 & t < t'
\end{cases}
\quad ...(47)
}
と定義して,これを
t
′
:
(
t
0
,
∞
)
{\displaystyle t':(t_0,\infty)}
x
¯
0
(
t
)
=
∫
t
0
∞
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
.
.
.
(
48
)
{\displaystyle
\bar{x}_0 (t)=\int_{t_0}^{\infty}{G(t,t')f(t')d t'}
\quad ...(48)
}
は
L
x
=
f
{\displaystyle L x=f}
L
{\displaystyle L}
t
{\displaystyle t}
∫
t
0
∞
d
t
′
{\displaystyle \int_{t_0}^{\infty}{dt'}}
t
{\displaystyle t}
L
x
¯
0
(
t
)
=
L
∫
t
0
∞
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
=
∫
t
0
∞
[
L
G
(
t
,
t
′
)
]
f
(
t
′
)
d
t
′
.
.
.
(
49
)
{\displaystyle
\begin{align}
L\bar{x}_0(t)
&=L\int_{t_0}^{\infty}{G(t,t')f(t')d t'}\\
&=\int_{t_0}^{\infty}{[LG(t,t')]f(t')d t'}
\quad...(49)
\end{align}
}
具体的に計算すると
D
x
¯
0
(
t
)
=
∫
t
0
∞
[
D
G
(
t
,
t
′
)
]
f
(
t
′
)
d
t
′
=
∫
t
0
∞
1
Δ
t
G
(
t
+
Δ
t
,
t
′
)
f
(
t
′
)
d
t
′
−
∫
t
0
∞
1
Δ
t
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
=
∫
t
0
t
+
Δ
t
1
Δ
t
G
(
t
+
Δ
t
,
t
′
)
f
(
t
′
)
d
t
′
−
∫
t
0
t
1
Δ
t
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
=
∫
t
t
+
Δ
t
1
Δ
t
G
(
t
+
Δ
t
,
t
′
)
f
(
t
′
)
d
t
′
+
∫
t
0
t
1
Δ
t
G
(
t
+
Δ
t
,
t
′
)
f
(
t
′
)
d
t
′
−
∫
t
0
t
1
Δ
t
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
=
G
(
t
+
Δ
t
,
t
)
f
(
t
)
+
∫
t
0
t
∂
∂
t
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
.
.
.
(
50
)
{\displaystyle
\begin{align}
D\bar{x}_0(t)
&=\int_{t_0}^{\infty}{[DG(t,t')]f(t')d t'}\\
&=\int_{t_0}^{\infty}{\frac{1}{\Delta t}G(t+\Delta t,t')f(t')d t'}\\
&-\int_{t_0}^{\infty}{\frac{1}{\Delta t}G(t,t')f(t')d t'}\\
&=\int_{t_0}^{t+\Delta t}{\frac{1}{\Delta t}G(t+\Delta t,t')f(t')d t'}\\
&-\int_{t_0}^{t}{\frac{1}{\Delta t}G(t,t')f(t')d t'}\\
&=\int_{t}^{t+\Delta t}{\frac{1}{\Delta t}G(t+\Delta t,t')f(t')d t'}\\
&+\int_{t_0}^{t}{\frac{1}{\Delta t}G(t+\Delta t,t')f(t')d t'}\\
&-\int_{t_0}^{t}{\frac{1}{\Delta t}G(t,t')f(t')d t'}\\
&=G(t+\Delta t,t)f(t)\\
&+\int_{t_0}^{t}{\frac{\partial}{\partial t}G(t,t')f(t')d t'}
\quad...(50)
\end{align}
}
ところが,(49)の定義をみると
G
{\displaystyle G}
t
>
t
′
{\displaystyle t>t'}
G
(
t
+
Δ
t
,
t
)
=
x
1
(
t
)
x
2
(
t
+
Δ
t
)
−
x
1
(
t
+
Δ
t
)
x
2
(
t
)
W
(
x
1
(
t
)
,
x
2
(
t
)
)
=
x
1
(
t
)
x
2
(
t
)
−
x
1
(
t
)
x
2
(
t
)
W
(
x
1
(
t
)
,
x
2
(
t
)
)
=
1
.
.
.
(
51
)
{\displaystyle
\begin{align}
G(t+\Delta t,t)
&=\frac{x_1(t)x_2(t+\Delta t)-x_1(t+\Delta t)x_2(t)}{W(x_1(t),x_2(t))}\\
&=\frac{x_1(t)x_2(t)-x_1(t)x_2(t)}{W(x_1(t),x_2(t))}\\
&=1
\quad...(51)
\end{align}
}
したがって,先の計算は
D
x
¯
0
(
t
)
=
f
(
t
)
+
∫
t
0
t
∂
∂
t
G
(
t
,
t
′
)
f
(
t
′
)
d
t
′
=
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
D
x
2
(
t
)
]
−
[
D
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
.
.
.
(
52
)
{\displaystyle
\begin{align}
D\bar{x}_0(t)
&=f(t)+\int_{t_0}^{t}{\frac{\partial}{\partial t}G(t,t')f(t')d t'}\\
&=f(t)+\int_{t_0}^{t}{\frac{x_1(t')[Dx_2(t)]-[Dx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}
\quad...(52)
\end{align}
}
となってしまう.この時点で
f
(
t
)
{\displaystyle f(t) }
D
2
x
¯
0
(
t
)
=
D
f
(
t
)
+
+
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
D
2
x
2
(
t
)
]
−
[
D
2
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
.
.
.
(
53
)
{\displaystyle
\begin{align}
D^2\bar{x}_0(t)
&=Df(t)+\\
&+f(t)+\int_{t_0}^{t}{\frac{x_1(t')[D^2x_2(t)]-[D^2x_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}
\quad...(53)
\end{align}
}
となるので
L
x
¯
0
(
t
)
=
D
f
(
t
)
+
f
(
t
)
+
∫
t
0
t
x
1
(
t
′
)
[
L
x
2
(
t
)
]
−
[
L
x
1
(
t
)
]
x
2
(
t
′
)
W
(
x
1
(
t
′
)
,
x
2
(
t
′
)
)
f
(
t
′
)
d
t
′
=
D
f
(
t
)
+
f
(
t
)
.
.
.
(
53
)
{\displaystyle
\begin{align}
L\bar{x}_0(t)
&=Df(t)+f(t)\\
&+\int_{t_0}^{t}{\frac{x_1(t')[Lx_2(t)]-[Lx_1(t)]x_2(t')}{W(x_1(t'),x_2(t'))}f(t')d t'}\\
&=Df(t)+f(t)
\quad...(53)
\end{align}
}
このように
D
f
(
t
)
{\displaystyle Df(t)}
以上のように,(47)で定義した関数を使った(48)式は,特殊解にはならない.
2-7 糸の長さが伸びる振り子 [ ] 糸が時間に比例して伸びる場合の振り子の運動を議論する問題。めちゃくちゃ時間かかりました。
なかなかやばい問題でしたね、、、
まず運動方程式を立てますが、θではなくxについて運動方程式を立てます。またこのときlの伸び縮みによって働く力も忘れないでください(結局加速度は0になるので関係ありませんが・・・)
この運動方程式を変形して次のようにします。
z
d
2
x
d
z
2
+
x
=
0
{\displaystyle z\frac{d^2 x}{dz^2}+x=0}
ここからが大変でした、、、Besselの微分方程式に帰着させて、Bessel関数とNeumann関数の線型和としてこの方程式の解を表現するのですが、そのためにはx=z^α*X(Z)、Z=γz^βと置いて(1)式に代入します。
(参考:「糸の方程式の境界条件について」URL:http://takeno.iee.niit.ac.jp/~shige/math/lecture/misc/data/lstring1.pdf )
そしてα、β、γを調整するとBesselの微分方程式に直しことができて、結果的に(1)式を解くことができます。
ちなみにθ(t)の時間変化をグラフにすると以下のようになります。
教科書の式参照。g=9.807,α=1/8,A=1,B=1とした。
ちなみに漸近公式ですが、次の図のようにかなり良い近似を与えます。
ベッセル関数:青 漸近式:緑
ノイマン関数:青 漸近形:緑
そのためθ(t)の式にこの漸近公式を代入します。
すると三角関数の線型和として表現できるため、振動の周期を近似的に求められる。
最後は断熱定理(次の問題にも出てくる)。
断熱定理は量子力学やプラズマ物理学などでよく出てきて、最近では量子アニーリングにも応用されているが、最も基本的なものの一つとして振り子の振動数とエネルギーの比がある。
ここでは振動数、エネルギーをともに1から求めて断熱定理を示している。
2-11 周期的にバネ定数が変化する系 [ ] 周期的にばねの強さが変化する系の安定性を論じるのが目的です。
当初ばね定数の時間変化を表す図2.4を見てこんな系を本当に調べられるのか疑問でした。しかし手計算による考察でも系の安定性をある程度調べることができることに驚きました。
(a)
系の時間変化を与える行列を求めるために時間変化を記述する運動方程式を立てましょう。その際、
1.ばね定数が違うのなら別の運動方程式に従う
2.時間を変数変換して方程式からωを消す
という意識でやりましょう。
1は当然のことなのですが、運動方程式を一本にまとめる?努力(例えばクロネッカーデルタを使ったりして)をする人がいるかもしれないのであえて書きました。(もしかしたらその努力は報われるのかもしれません。報われた方はその経緯を加筆してください。)
2は多分式を簡単にするためだと思います。
次に時間変数をτからσにします。この処置は時間座標の原点をずらすことに他なりません。これはバネの強さが変化する時刻を原点にした方が、そのバネの強さの時の運動を調べやすいからだと思います。
運動方程式を解くとx,x'の時間変化が判明するので、ベクトル(x,x')を変化させる行列が分かります。この行列は系の時間発展演算子と言えますね。運動方程式は2つあるので時間発展演算子は2つ求まります。
本筋とは関係ない(4)と(7)とについては(d)で説明します。
(b)
線形代数の知識で一発ですね。
(c)
行列のn乗を求めるために対角化します。そのために固有方程式を解きましょう。
(9)式は固有値方程式を求めたら出てきます。
(d)
(4)により相空間での軌道は楕円の一部という結果が得られています。
でも(4)式はどういう発想からでてくるのでしょうか?
恐らくですが(3)の行列を見て「直交行列に似ているな」と思うことが要だと思います。
(直交行列を作用した後のベクトルの大きさは元のベクトルの大きさと同じです。)
(3)の行列を無理矢理直交行列にしてみると
となりますので2つのベクトル:
は大きさが同じになります。
よって(4)が求まる、というわけです。(7)も同様の手続きで求まります。
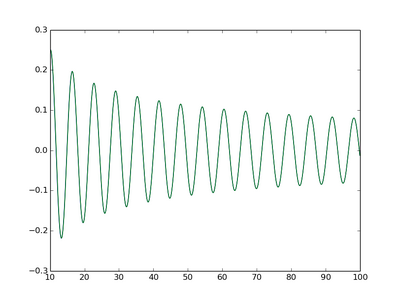
図2.15の描画は計算機に任せましょう。こんな感じになりました。
図2.16(b)の点の位置は私が用意した図とは微妙に違いますね・・・(^_^;)
(e)
kやεの値によって系が安定するかどうかを論じます。
(c)ではkが整数や半整数の場合に系が不安定になると判明しましたが、Δkを導入してtrMの値を調べると系を不安定にするkの値が色々あることが分かります。
どの(k,ε)の組が系を不安定にするかは図2.16を見れば一目瞭然ですね。この図が途中で途切れているのは近似が有効なところだけを表示しているからです。
(補足)
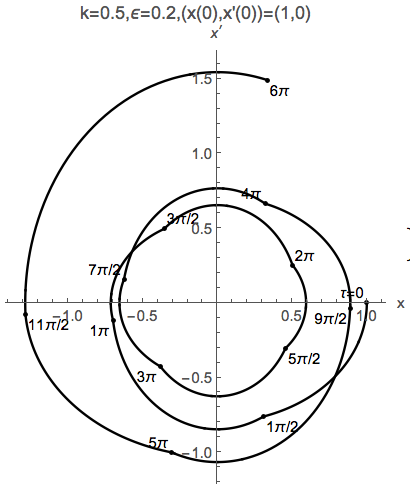
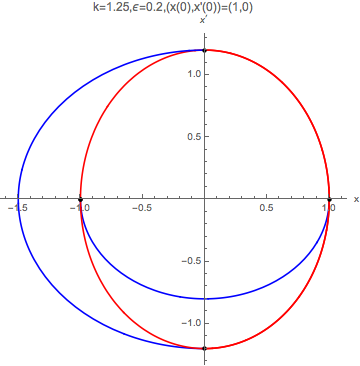
以下の図は青はバネが弱い時、赤はバネが強いときを表し、系が安定とされる(k,ε)=(1.25,0.2)で描きました。
図を見ると「系が安定⇔相空間の軌道が閉じている」ということが分かります。そして軌道が閉じるということは系の状態がいつか初期状態と同じになり、そのタイミングで最初と同じ強さのバネの影響を受け始める、ということも分かります。(初期状態から弱いバネの力を受けて状態が変化し、巡り巡って赤から青へ切り替わる瞬間の状態が初期状態と同じであった軌道が閉じるのです。)
但し「(e):(系が安定⇔|trM|<2」)⇒「系の状態が再帰する」を導けるかは分かりません。できた方はその証明の加筆をお願いします。
2-14 Lenzベクトル [ ] 解説ですPDFです。
https://drive.google.com/file/d/0B4JUep9TeHAWMmZncTc2V2NzUVE/view?usp=sharing
軌道のgifアニメです。(また、貼り直します)
*更新履歴
17.03.14 軽微な修正
2-15 中心力 解の安定性 [ ] (a)中心力が働いている中での円軌道の安定性について議論する問題です。何となくどんな中心力でも安定なような気がしますが、実はそんなことはなく、中心力の性質によります。手順としてはまず、等速円運動しているときの極座標での運動方程式を書き、さらに
r
=
r
0
+
δ
r
(
t
)
,
θ
˙
=
ω
0
+
δ
ω
(
t
)
{\displaystyle r=r_0 + \delta r (t),\dot{\theta}=\omega_0 + \delta \omega (t)}
r
2
ω
=
r
0
2
ω
0
(
1
+
ϵ
)
,
r
=
r
0
+
ϵ
ξ
1
{\displaystyle r^2\omega=r_0^2\omega_0(1+\epsilon),r=r_0+\epsilon\xi_1}
δ
r
¨
=
(
−
3
ω
0
2
−
1
m
f
′
(
r
0
)
)
δ
r
+
C
{\displaystyle \ddot{\delta r}=(-3\omega_0^2-\frac{1}{m}f'(r_0))\delta r + C}
解が安定であるということはこのずれが有限に収まるということなので、
−
3
ω
0
2
−
1
m
f
′
(
r
0
)
<
0
{\displaystyle -3\omega_0^2-\frac{1}{m}f'(r_0)<0}
ここで仮定した「ずれ」のことを「摂動」と言います。量子力学の近似法としても出てきます。
Newton力学のもとで計算するとエネルギーが負である限り解は安定だとわかりますが、実は一般相対論で計算すると必ずしもそうではないということが分かります。
(b)
δ
r
{\displaystyle \delta r }
δ
ω
{\displaystyle \delta\omega}
(c)軌道が閉じる条件について考えます。t=0からスタートしてt=Tで軌道が閉じるとすると
r
(
0
)
=
r
(
T
)
,
r
˙
(
0
)
=
r
˙
(
T
)
,
θ
(
0
)
+
2
n
π
=
θ
(
T
)
{\displaystyle r(0)=r(T),\dot{r}(0)=\dot{r}(T),\theta(0)+2n\pi=\theta(T)}
ν
0
ω
1
=
p
{\displaystyle \frac{\nu_0}{\omega_1}=p}
ν
0
{\displaystyle \nu_0}
ω
0
{\displaystyle \omega_0}
θ
˙
{\displaystyle \dot{\theta}}
ν
0
{\displaystyle \nu_0}
(d)
2-16 散乱断面積 [ ] (a)具体的な計算は大して難しいことをやっていない上にごちゃごちゃしているのでここでは省略。ここに載せることとして有用なのはむしろΘ=π-2θ_0になる理由でしょう。解答解説にも書いてありますがもう少し具体的に書こうと思います。
2-16(a)
(b)「散乱の微分断面積」とは何ぞや、という感じですね。解答の計算から、これは「散乱された後、ある立体角要素dΩに粒子がいるとしたときの、入射粒子の存在しうる面積要素dσ」という感じです。これでもなんだかピンとこないけど、例えば散乱の条件設定を「一定の面密度で、同じ速度の粒子を入射していく」と考えるともう少し考えやすくなります。このとき粒子数は面積要素に比例するので「散乱されたのち、ある立体角要素dΩにいる粒子の数」と考えることもできますね。これだともう少しイメージしやすいのではないでしょうか。Wikipedia



















![{\displaystyle g[(b^{2}y+2bDy+D^{2}y)+2\beta (by+Dy)+\gamma ]y=g{\tilde {f}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/a85afd30d4994f91cb2c792b5a88324e57afc806)
![{\displaystyle [(b^{2}y+2bDy+D^{2}y)+2\beta (by+Dy)+\gamma ]y={\tilde {f}}\quad ...(4)}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/86d7b879279de2a3c456392c305c44d9f1064f7f)























![{\displaystyle {\begin{aligned}L_{0}[y(t)-y_{0}(t)]=0...(15)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/d4d7d2aa4f40aaa5e5c48753f1c62e9b7c0f36e1)





































































![{\displaystyle {\begin{aligned}Dx_{0}(t)&={\frac {1}{\Delta t}}\int _{t_{0}}^{t+\Delta t}{{\frac {x_{1}(t')x_{2}(t+\Delta t)-x_{1}(t+\Delta t)x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&-{\frac {1}{\Delta t}}\int _{t_{0}}^{t}{{\frac {x_{1}(t')x_{2}(t)-x_{1}(t)x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&={\frac {1}{\Delta t}}\int _{t_{0}}^{t+\Delta t}{{\frac {x_{1}(t')x_{2}(t)-x_{1}(t)x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&-{\frac {1}{\Delta t}}\int _{t_{0}}^{t}{{\frac {x_{1}(t')x_{2}(t)-x_{1}(t)x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&+{\frac {1}{\Delta t}}\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Dx_{2}(t)\Delta t]-[Dx_{1}(t)\Delta t]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&={\frac {1}{\Delta t}}\int _{t}^{t+\Delta t}{{\frac {x_{1}(t')x_{2}(t)-x_{1}(t)x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Dx_{2}(t)]-[Dx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&={\frac {x_{1}(t)x_{2}(t)-x_{1}(t)x_{2}(t)}{W(x_{1}(t),x_{2}(t))}}f(t)\\&+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Dx_{2}(t)]-[Dx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&=\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Dx_{2}(t)]-[Dx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\quad ...(44)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/25e13dc9df2b9dce9ddc86267e67ea3d56112b42)
![{\displaystyle {\begin{aligned}D^{2}x_{0}(t)&={\frac {x_{1}(t)[Dx_{2}(t)]-[Dx_{1}(t)]x_{2}(t)}{W(x_{1}(t),x_{2}(t))}}f(t)\\&+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[D^{2}x_{2}(t)]-[D^{2}x_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&=f(t)+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[D^{2}x_{2}(t)]-[D^{2}x_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\quad ...(45)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/9f1a525a8ec24034c68022e60154059579a9812c)
![{\displaystyle {\begin{aligned}Lx_{0}(t)&=f(t)+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Lx_{2}(t)]-[Lx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&=f(t)\quad ...(46)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/b9a6b53ac848a599ddbf7b88949e10c9056aa456)





![{\displaystyle {\begin{aligned}L{\bar {x}}_{0}(t)&=L\int _{t_{0}}^{\infty }{G(t,t')f(t')dt'}\\&=\int _{t_{0}}^{\infty }{[LG(t,t')]f(t')dt'}\quad ...(49)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/ccc37f0cb3c86a3152528b71e55ceeb250702dd5)
![{\displaystyle {\begin{aligned}D{\bar {x}}_{0}(t)&=\int _{t_{0}}^{\infty }{[DG(t,t')]f(t')dt'}\\&=\int _{t_{0}}^{\infty }{{\frac {1}{\Delta t}}G(t+\Delta t,t')f(t')dt'}\\&-\int _{t_{0}}^{\infty }{{\frac {1}{\Delta t}}G(t,t')f(t')dt'}\\&=\int _{t_{0}}^{t+\Delta t}{{\frac {1}{\Delta t}}G(t+\Delta t,t')f(t')dt'}\\&-\int _{t_{0}}^{t}{{\frac {1}{\Delta t}}G(t,t')f(t')dt'}\\&=\int _{t}^{t+\Delta t}{{\frac {1}{\Delta t}}G(t+\Delta t,t')f(t')dt'}\\&+\int _{t_{0}}^{t}{{\frac {1}{\Delta t}}G(t+\Delta t,t')f(t')dt'}\\&-\int _{t_{0}}^{t}{{\frac {1}{\Delta t}}G(t,t')f(t')dt'}\\&=G(t+\Delta t,t)f(t)\\&+\int _{t_{0}}^{t}{{\frac {\partial }{\partial t}}G(t,t')f(t')dt'}\quad ...(50)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/8d71b1bd20cb587fa12ebdca3e665a54c788f31d)


![{\displaystyle {\begin{aligned}D{\bar {x}}_{0}(t)&=f(t)+\int _{t_{0}}^{t}{{\frac {\partial }{\partial t}}G(t,t')f(t')dt'}\\&=f(t)+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Dx_{2}(t)]-[Dx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\quad ...(52)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/08e9c1be2966d30534215a97fa6f08a4e7cb35c2)
![{\displaystyle {\begin{aligned}D^{2}{\bar {x}}_{0}(t)&=Df(t)+\\&+f(t)+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[D^{2}x_{2}(t)]-[D^{2}x_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\quad ...(53)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/3f23224de38812d42d45d4b60d6fbce6152d844d)
![{\displaystyle {\begin{aligned}L{\bar {x}}_{0}(t)&=Df(t)+f(t)\\&+\int _{t_{0}}^{t}{{\frac {x_{1}(t')[Lx_{2}(t)]-[Lx_{1}(t)]x_{2}(t')}{W(x_{1}(t'),x_{2}(t'))}}f(t')dt'}\\&=Df(t)+f(t)\quad ...(53)\end{aligned}}}](https://services.fandom.com/mathoid-facade/v1/media/math/render/svg/01426f4ae273a8d82baba3a20868fb9a948d4d35)






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}